教授
えのきだ しゅういち
私が様々な研究に興味を持つようになったきっかけは、学生時代の自律型ロボットに関する研究でした。自律型ロボットは、視覚センサを用いて周囲の情報を取得し、アクチュエータを用いて何らかの出力を返します。視覚センサーから得た画像から有用な情報を抽出するために画像処理工学を研究し、その情報から適切な出力への変換に、機械学習やパターン認識を適用しました。そして、これらの技術を実生活に生かしたいとの思いから、現在の研究に進展しました。

コンピュータがあなたの安全運転を“そっと”サポートします
コンピュータビジョン、パターン認識
車載カメラ・ドライブビデオレコーダ・画像処理工学・動画像からの運動解析
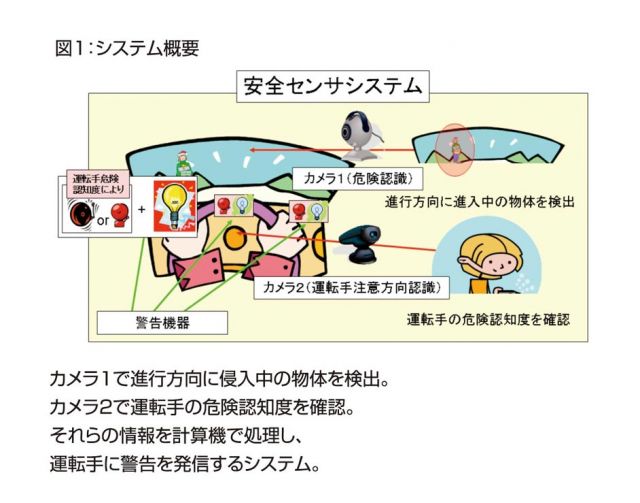
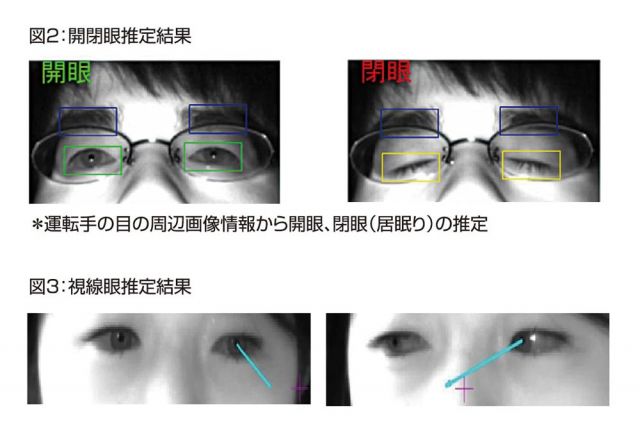
本研究では、低価格で多くの情報を獲得可能と期待される視覚センサ(CCDカメラなど)に危険認知度を付加した安全センサシステムを開発しています。従来から画像処理とパターン認識技術を組み合わせて、リアルタイムに動作するシステムを数多く開発してきたことが、この研究においても大きな強みとなっています。 想定しているシステムは、乗用車のフロントガラス(ルームミラー裏)に後付可能なもので、市販のドライブレコーダに機能を付加したものをイメージしています。このように低価格で後付可能なシステムが開発されると、新車のみならず、使用中の車にも取り付け可能で、「安心・安全」な車社会の実現に寄与することが期待できます。2009年度より企業と協力して、製品化に向けて開発を進めるなど、基礎研究から応用に発展しているところです。
画像処理とパターン認識技術を応用すれば、広い範囲をセンシングし、人間にとって有益な情報を自動判断し、提供するシステムを安価に提供できる可能性があります。農作物の病気早期発見や適切な収穫時期の推定等で農工連携にも貢献したいと考えています。
【実験機材(自動車に後付けするシステムを開発対象としているため)】
① 実験用車両(GPS+4方向カメラ装着+4カメラ画像同時記録)
② RTK-GPS(トプコン社製 LEGACY-E+GDD 三次元位置情報を誤差数センチ単位で計測.建築時の測量に利用されるものの時間方向サンプリングレート(20Hz)を向上したもの)
③ 遠赤外線カメラ(NEC Avio赤外線テクノロジー株式会社製 IR-20)
④ 近赤外線発光源+カメラ(自作)
⑤ 超ワイドダイナミックレンジ(170db)カメラ(アドバンスドソリューション社製 HDRC)
『物体運動推定装置、物体運動推定方法、プログラム及び記録媒体』 特願 2009-041360
『物体追跡方法および物体追跡装置ならびにプログラム』 特開 2006-227973
『評価関数生成方法及び個人識別装置並びに個人識別方法』 特開 2006-136430
『車両挙動解析装置及び車両挙動解析プログラム』特願2010-172695
【共同研究】
『車載カメラを用いた安全システムのための画像解析技術の開発』 (2008)
『画像解析技術開発基礎研究』 (2006-2007)
【受託研究】
『車載カメラによる安全センサシステムの研究開発』 (2007-2009)
『安全管理マネージメントシステムの研究開発』 (2008)
オープンキャンパスでの動画紹介
http://opencampus.el.kyutech.ac.jp/iizuka/movie/ai.enokida/001.html/
https://www.kyutech.ac.jp/kyutechlab/enokida.html