





教授
こが まさのぶ
道具を使ってものを作るより、道具を作ることを好む性格です。そのため、道具の原理や歴史を調べ、納得いく道具を作り、それからものを作る、ということが多いように思います。実際に道具を作り始めると、いろいろな知見が得られ(面白い発見があり)、そこから試行錯誤(研究)が始まると言えるかもしれません。

数理的知のソフトウェアによる表現を目指して
制御工学
数値計算、シミュレーション、モデリング、制御系設計、リアルタイム制御
当研究室では、ますます増大して行くコンピュータの能力を最大限に引き出すことができる、数学とソフトウェア工学をリンクした新しい概念を持つ基盤的ソフトウェアの開発を行っています。例えば、精度保証つき数値計算や多倍長演算(コンピュータのハードウェアが直接扱える桁数を超えた演算)技術により任意の精度を保証できる高品質数値計算が可能になります。本研究は産業的に広範囲の応用が期待されますが、現在は、応用の目的を「制御」に着目して研究を行っております。具体的には「制御システム理論による実際のシステム構築に関する問題に計算機を最大限に活用する」という立場で以下の課題に取組んでいます。
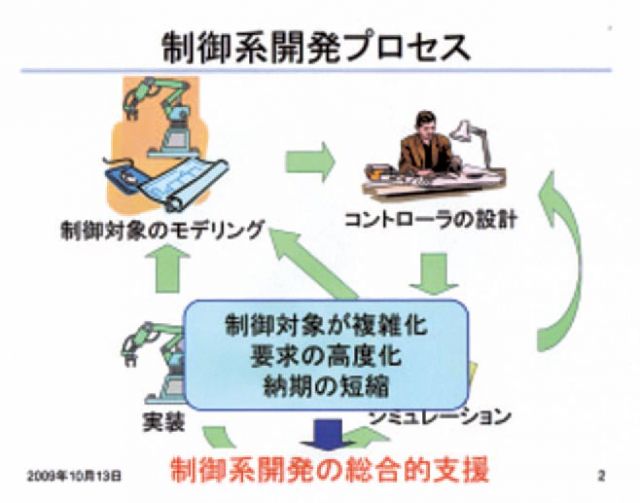
制御系の開発プロセス(モデリング、解析、設計、シミュレーション、可視化、リアルタイム制御)を支援するCADを開発しています。(右図参照)
数値計算言語(MaTX)、数値計算ライブラリ、数式処理ツール、並列処理フレームワーク、高品質計算ライブラリを開発しています。尚、MaTXは科学や工学に必要な数値および数式計算をサポートする記述性に優れたプログラミング言語で、東京工業大学 古田勝久教授の支援を受けて古賀が開発し、1989年以来、国内外の多くの教育機関や企業で、制御系の解析、設計、シミュレーションに使われています。
精度保証付き制御機器設計、線形行列不等式に基づく制御系設計に関する研究をしています。
・ 特にJava関連技術を応用した計測制御分野へのソフトウェア工学の活用
・ 高品質数値計算(高精度、精度保証)ソフトウェアの能力向上
開発したソフトウェアはオープンソースの形で公開し、自由に使っていただけるようにしており、特許の形で保有しているものはありません。
【共同研究】
▶高炉統合シミュレーターと統合可視化システム開発(某製鐵所)
【学術論文】
▶『LQ制御問題の精度保証付き数値計算』(計測自動制御学会 vol45 No.5 261/267 (2009) )
▶『Javaによる高炉統合シミュレーターと統合可視化システム』(計測自動制御学会産業論文集 4/13、91-97(2005) )
▶『行列のジョルダン標準形の数値計算法』(システム制御情報学会 15/7、 320-326(2002) )
▶『初期角運動量を有する劣駆動飛遊系の姿勢制御』(日本ロボット学会誌 19/4、461-467(2001) )
著書
『制御・数値解析のためのMaTX』(東京電機大学出版局)
『Linux・WindowsでできるMaTXによる数値計算』(東京電機大学出版局)

