





教授
おおや まさひろ

危険な振動を止める技術を開発する
機械力学、制御工学
移動ロボット、 マニピュレータ、 アクティブサスペンション、自動車の制御、ロボットの制御
制御理論の開発として、どんなものでも、どんなに環境が変化しても、思い通りに対象を動かすことができる適応制御理論の開発をしています。
通常は車両の一か所だけで乗り心地が最良となります。この場所を移動するには、アクティブサスペンション制御用のコントローラーを再設計する必要がありますが、そのためには膨大な時間を必要とします。この問題を解決するため、設計パラメーターの値を設定するだけで乗り心地が最良としたい場を簡単に移動させることのできる制御手法を開発しました。
コーナーを走行中に自動車が滑りやすい砂の上や油の上を走行した場合、操縦者には突然異常な横滑り振動が発生したように感じられます。そのような自動車の動きに遭遇して、もし操縦者が不慣れな場合、大きな事故に発展する恐れがあります。このような事故を防ぐため、まず、理想的な動きを実現できる理想車両モデルを開発し、実際の自動車の動きを追従させるロバスト(注1)軌道追従制御法も開発しました。
(注1)※ロバスト(Robust)とは、本来は「頑健な」という意味だが、生産管理などでは、プロセスの変動があっても、その影響を受けずに、欠陥やシステム停止が生じないプロセスのことをいう。制御では、外乱が加わっても、システムが本来の安定した制御を持続できる能力のこと。
災害地などの人間が容易に入り込めない場所において、活躍する移動ロボットにおいては、搭載したカメラ映像が振動することにより遠隔地で操作しているオペレータの疲労が極度に悪化するという問題があります。また、車体振動により、車体に搭載した精密機器に損傷が生じる危険性もあります。
この振動問題を解決する振動制御法を開発しました。
大型車両のローリング制御法の開発
毎年のように大型車両の転倒事故がニュースに流れています。車両がコーナーを曲がる際に、必要以上のハンドル操作が加わると、荷物部分に大きなローリング振動が生じることが、転倒事故の一つの原因であるものと考えられます。そこで、今までに開発してきた制御手法などを応用し、荷物部分のローリング振動を抑え込むことができる制振技術の開発を行うことにより、転倒事故減少に寄与できるものと考えています。
階段登り降りロボット
『咀嚼回数検出装置』 (特許3619835号(2004))
【受託研究】
配管検査用センサシステムの開発(2007)
マルチ自走式配管内遠隔検査補修ロボットシステム開発(2005-2008)
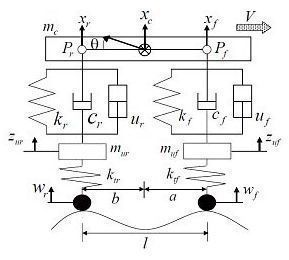
ローリング制御法の模式図

階段登り降りロボット

