





教授
わだ ちかむね
私は目が悪く、眼鏡では視力が出ません。そのため、人工眼が作れれば良いなと考えていました。たまたま北海道大学に生体工学専攻があることを知り、人工眼を作りたいと思い入学しました。そこで、工学的に障害者や高齢者を支援する福祉工学を知り、いまも同じ分野の研究を続けています。
工学技術で困っている人を支えたい
福祉工学、リハビリテーション科学、計測工学
福祉工学、ヒューマンインターフェース、生体計測、感覚代行、機能代行
福祉工学に関するヒトの動作計測方法の開発や動作推定手法に関する研究をおこなっています。
例えば、(1)歩行訓練を支援するために、歩行状態を計測できるセンサを搭載した靴の開発、(2)介護者の腰痛を減らすために、腰に負担の少ない介護動作を誘導する方法の開発、です。
(1)について:研究が完成すると、自分の足位置や体重のかかり具合を把握することができるため、より効果的なリハビリ訓練をおこなうことができます。また、センサ搭載靴を在宅で履いて歩行すると、遠隔からのリハビリ指導も可能となるため、日常生活でのリハビリが可能になります。
(2)について:研究が完成すると、身体に装着したセンサの情報をもとに、腰にかかる負担を推定できます。もし腰痛発生の可能性の高い動作になりそうな場合には、腰にかかる負担の少ない動作になるよう、例えば、足位置等を誘導します。
他にも、進行中の研究がありますので、ご興味があればお尋ねください。
視覚障がい者が単独で移動する際,駅ホームからの転落や交差点での信号色の判断の難しさなど様々な問題があります。そこで、画像処理技術やセンサ技術を用いて、ホーム端を検出し転落事故を防止する手法や交差点の信号色を識別・通知する手法の開発研究を進めています。この研究は、企業と共同で進めています。
使用者の快適さ・便利さ・安全・安心に寄与する、格好の良い支援機器を開発したいと思っています。
市販装置としては、モーションキャプチャシステム(光学式3次元動作解析装置)、ファストラックシステム(磁気式3次元位置計測装置)、床反力計を保有しており、ヒトの動作・運動解析をおこなうことができます。ただ、市販の装置では、研究に必要なデータの計測が難しい場合が多いため、センサを組み合わせて製作しています。
「歩行訓練支援装置」(特許第4581087)
「起立動作誘導システム」(特許6218307)
「視覚無しでの方向誘導システム」(特開2010-197234)
「人体部位位置及び生体情報の計測システム」(特開2005-121427)
「手のひら書き入出力システム」(特開2004-013885)
「触覚刺激を利用した眼鏡型の物体位置呈示システム」(特開2004-008748)
【共同研究】
①「自立支援に着目した杖型立ち座り動作支援機器の開発」(2018~2019)
②「松葉杖歩行時の脇当て脱落による転倒リスクを軽減する松葉杖構造の変更に関する研究」(2015~2017)
③「場所を選ばず身体への負荷が少ない起立動作姿勢推定システムの開発」(2015~2017)
【受託研究】
「労働現場で実現可能な労働支援ツールの評価分析ツールの試行及びデータ分析」(2014)
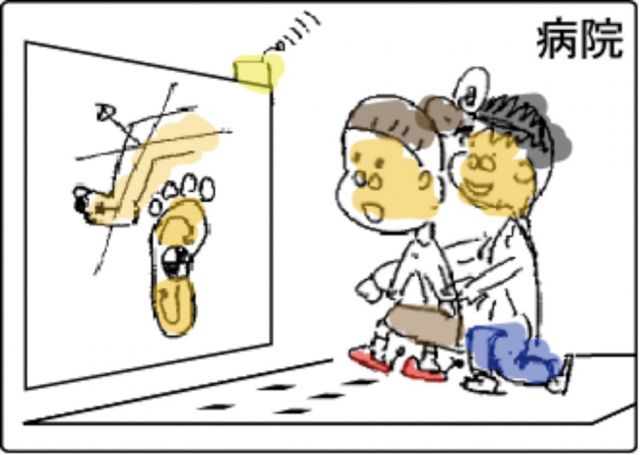
靴型計測装置を履くだけで、足の位置や体重のかかり具合をわかりやすく表示する。
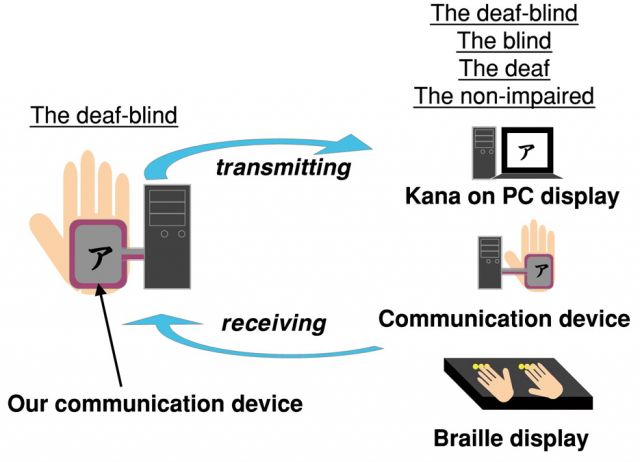
装置を掌に装着すると、その装置に書いた文字が周囲の機械に送られる。逆に、周囲の機械に入力された文字は、装置により、掌に文字の形となって再現される。
http://fais.ksrp.or.jp/05kenkyusha/srchres.asp?page=1&course=%90l%8A%D4%92m%94\%8B@%8AB

