





准教授
みやもと ひろゆき
私たちは、電動車椅子などへの応用を目指した「球駆動式全方向移動装置」を開発しています。
この研究は、情報工学部の卒業研究に配属された学生が、自動車大好きなことがきっかけとなりました。現在、彼は実用的な装置の完成と博士号の取得を目指して充実した日々を送っています。

生物の運動制御機構の情報処理原理の解明
知能機械学、機械システム、ニューラルネットワーク、画像処理
運動制御、運動学習、見まね学習、運動計画, ロボット
人間の運動制御のメカニズムに関する脳の情報処理原理の解明とその工学的応用の研究を行います。心理実験や計算機シミュレーションによる腕の軌道生成モデルの検証や、運動学習ロボットの開発を目指しています。現在、人間の運動制御機構を調べようとしているところです。具体的には、「腕を空間のある点から別のある点に動かすときに、手先はどのような軌道を辿るのか?また、なぜそのような運動軌道を人間は生成しているのか?」というようなことです。このようなことを調べるために、人間の振る舞いを再現するような数学モデルを構築して、計算機シミュレーションで検証し、実際の人間の動作を計測して解析します。将来的には、研究成果を、見真似によってスキルを獲得するロボットや、ロボット自身の技能を自動的に向上させることのできる熟練技巧獲得ロボット、福祉ロボット等の開発に応用していきたいと考えています。
① ステレオカメラを用いた身振り認識
従来のモーションキャプチャシステムは、高精度な計測が可能ですが、装置が大規模で高価で、しかもマーカーなどの装着が必要です。そのため、家庭用の自律移動ロボットへの搭載には適していると言えません。そこで私たちは、精度は低いが安価で、人間の服装や背景によらず、マーカーを必要としない、平行ステレオカメラによるヒトの腕の姿勢を推定する装置を開発しています。
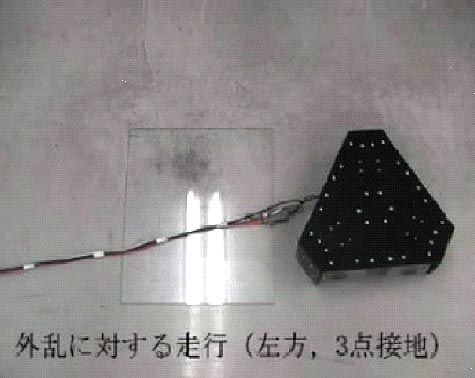
② 球駆動式全方向移動装置
本研究で提案する全方位移動機構は、3つの球で構成され、すべての球がロータにより移動方向に駆動されます。本機構は、接地性も良く外乱に対して強く安定した走行が可能です。
全方向移動の可能な電動車椅子の開発
『球体モジュール及びそれを用いた搬送装置』特願2010-288261
『自立式の歩行支援装置』特開2011-229838
『把持装置』」特開2011-073099
『球体駆動式全方向移動装置』特開2010-215082
『球体駆動式全方向移動装置』特開2010-173570
『球体駆動式全方向移動装置』特開2010-030360
『エッジ検出によるモデルマッチングを用いたカメラ校正方法』特許4821009
『プロジェクタ投影映像のマウス代替操作方法およびそのマウス代替操作システム』特開2008-250482
『ステレオ画像を利用した物体の位置および姿勢認識システム、物体の位置および姿勢認識方法、およびこの方法を実行するプログラム』特許4765075
『速度制御方法及び速度制御装置』特許4545701
『球体駆動式全方向移動装置』 特願2008-192590
『カメラキャリブレーションの自動化アルゴリズム』特開2007-064836
【共同研究】
▶ピッキングロボット用画像処理プログラムの開発(2009)
▶袋入り菓子のパターン認識(2009)
▶球駆動台車の研究(2008)
▶自立歩行アシストツールの開発、福岡県ロボット産業振興会議、平成21年度ロボット開発技術力強化事業
球駆動台車の研究」(2008)
▶カメラ画像検品装置のための画像処理および画像認識手法の研究(2007)
▶スタッカクレーンおよび移動体の最適速度制御の検討(2007)
▶全方向移動装置(球体駆動式)、北九州市平成20年度試作品づくり助成事業
▶ニューラルネットワークによるパラレルリンクロボットの制御(2006)
▶群ロボットを用いた協調作業に関する研究(2005)
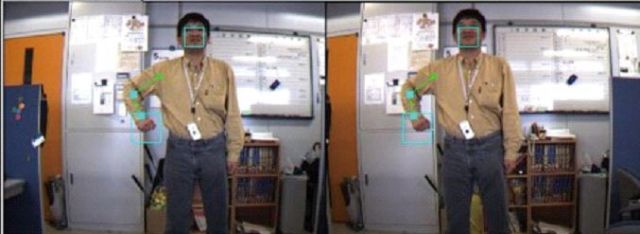
ステレオカメラを用いた身振り認識

球駆動式全方向移動車いすの走行風景

球駆動式全方向移動車いすの走行風景
http://fais.ksrp.or.jp/05kenkyusha/srchresult.asp?ID=h-miyamoto01

