教授
おおはし たけし

ロボットのソフトウェアのコンポーネント化
1006A パターン認識、1006B ロボティクス、
1004 ヒューマンインターフェース
パターン認識、ロボティクス、ヒューマンインターフェース
【一般的な説明】
現在、ロボットに関する研究が活発に行われています。ロボットはパソコンと同じようにCPUが使われていて、動作するためにはプログラムが必要です。人間と同じように対話するロボットなら、周囲の様子を見るためのカメラや音を聞くためのマイクが備わっています。そして、カメラからの画像を解析して人を見分けたり、音声を理解したりするためには、パターン認識という技術が使われます。ロボットが移動したり腕を動かしたりするためにはモーターなどが使われますが、正しい位置に動かすために、常に制御し続けなければなりません。周囲の状況の変化に合わせて、これらの作業を同時に行なえるようなプログラムを作っています。
【専門的な説明】
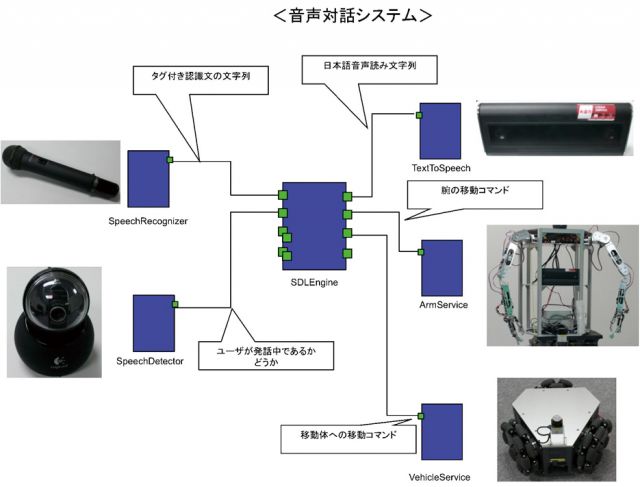
自律型ロボットは、自らが持つ多様なセンサーを通して外界の状況を取り込み、認識や判断を行い、自らその状況に相応しく行動しなければなりません。このため、まず画像認識や音声認識により、周囲の環境を認識しなければなりません。次に、何をするべきであるかは、その場の状況により変化するので、予め決めることはできません。そこで、試行錯誤を繰り返しながら知識を獲得する強化学習などの手法を活用する必要があります。さらに、実際に動作させるためには、多数のアクチュエータ(注1)の同期を取りながら、リアルタイムに制御しなければなりません。このように、自律型ロボットのプログラムを作るためには、様々な要素技術を組み合わせることが重要です。現在、ロボットに必要な、様々な機能を知能モジュール(注2)として用意し、容易に組み合わせて利用できるようにするプロジェクトが進められており、私たちも一部を担当しています。また、私たちの研究室は、現実世界で利用できる技術の開発を目指して、国際的研究プロジェクトであるRoboCup の @HOMEリーグに参加しています。
(注1)実際に動作させたり、制御したりする機構部分。(注2)完成品を構成する要素で、一定の機能を持った部分。部品よりはまとまった機能を持ち、しかも個別の完成品に対応したものではなく、汎用的に利用可能な要素群。
一般家庭で利用できるような自律型ロボットのソフトウェアの研究
自律型移動ロボット、ステレオカメラ、各種インターフェース機器、3Dディスプレイ
▶画像処理を用いた計測技術
▶知的な監視カメラ
実験