





教授
いとう ひろし
動きには無限の可能性があります、画一的には想像できないことがいっぱいあります。物の素質を見抜き、それに技をバランスさせると可能性が無限に生まれます。制御や動きのアルゴリズムの世界に、多様性を持ち込むと解決できることが沢山あります。それがすべての研究のきっかけです。

省エネ・ロバストな動作アルゴリズムを
① 電気・電子工学・・・制御工学
② 機械工学・・・機械力学・制御
ロバスト、電子制御システム、組み込み制御システム、大規模システム、生命システム
数学的な理論や物理的な理論を使って、人工機器から自然・生命まで、超微小から巨大な物まで広範囲の「動く」システムを対象に、ロバスト(注1)、省エネ、高出力、高速、精密、協調、自律などを実現する独自の制御アイデアを開発する基礎的研究をしています。
その狙いとなっている一つの例は、ハードディスクドライブヘッドの位置制御設計です。超大容量化と小型化が加速する中、データを読み書きするヘッドの超精密・高速位置決めが重要です。しかし、位置情報の取得レートに絶対的制限があります。そこで、ボイスコイルモーターとマイクロアクチュエータから成る二段アクチュエータを協調動作させるマルチレート制御理論を開発しています。これにより取得レートに制限がない場合の性能に近づけることが可能です。
もう一つの例は、携帯電話通信の電力制御アルゴリズムの設計です。CDMA通信方式(注2)では、複数ユーザが同一周波数の電波を使うため、基地局からの距離にかかわらず携帯電話が同じ送信電力で電波を出すと、近い方からの電波が強すぎて、遠い携帯電話からの信号を分離できません。そこで通信品質を保ちながら携帯電話のバッテリーの消費を抑えるために送信電力制御が必要です。非線形システム制御理論や安定論を用いると、最小限の電力消費で他の携帯電話機からの干渉を抑制し、電波の変動や通信遅れがある状況でも通信品質を落とさずに、各携帯電話を協調動作させる電力制御アルゴリズムが開発できます(図1)。
非線形システム制御理論や安定論を用いて、たんぱく質相互の動的メカニズムの究明の研究もしており、将来の医薬・医療開発に貢献することを目指しています。この他、基礎研究の対象としてきたシステムは数多く(図2、図3)、動きに関わる全てのものに興味があります。教員や学生を使っていただければそこに研究が生まれ、アイディアを提供するのが我々の研究です。
(注1)環境の変化に対する安定性。
(注2) Wideband Code Division Multiple Access。NTTドコモや Ericsson社などが開発した第3世代携帯電話(3G)の通信方式。高速移動時144kbps、歩行時384kbps、静止時2Mbpsのデータ伝送能力がある。1つの周波数を複数の利用者で共有できるので、周波数の利用効率が高い。
非線形特性への対処が鍵となるシステム、遅れのある遠隔通信を介したシステム、ロボット・移動体の群れの協調動作やバイオエンジニアリング関連を対象とした制御アルゴリズムの研究・開発
【共同研究】
下水処理システムの研究 2001-2003年(産学連携基礎研究)
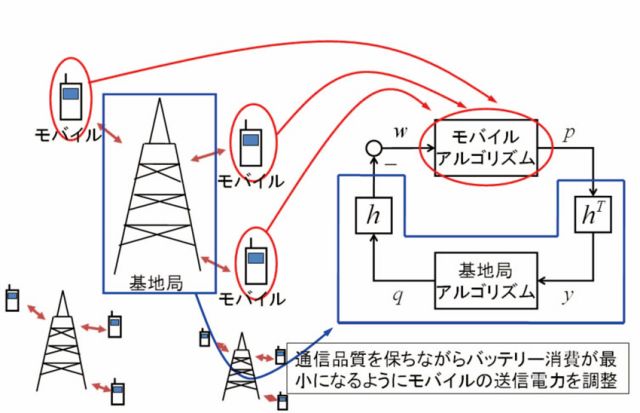
図1 CDMA(符号分割多重接続)電力制御アルゴリズム
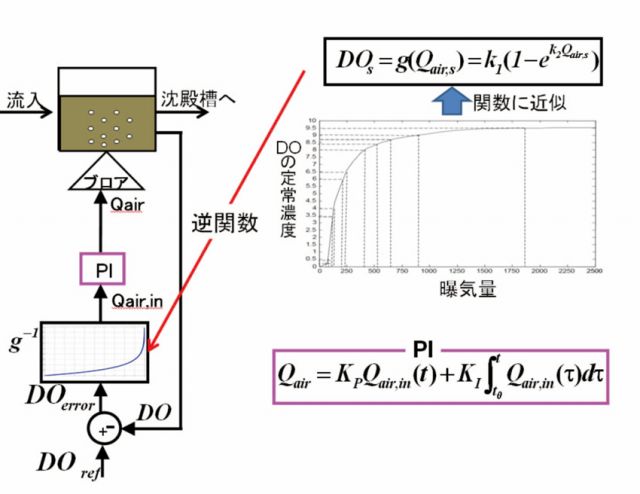
図2 下水処理施設の曝気*量制御 *曝気:汚泥を活性化するため、攪拌したり空気を吹き込んだりして酸素を供給すること。
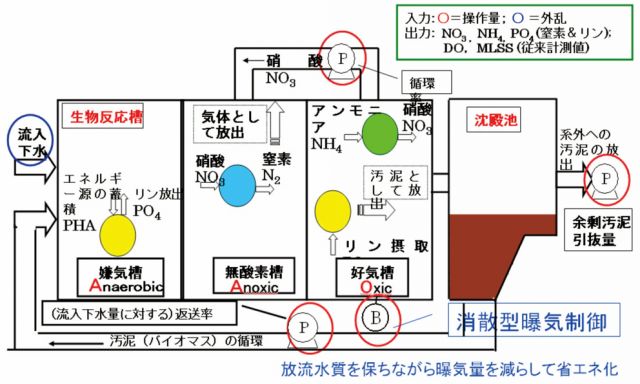
図3.活性汚泥法による消散型制御

