





准教授
こばやし けいご
工学部で学んできたロボット工学や制御工学の知識に、情報工学のデータ構造やアルゴリズムの技術を組み合わせれば、より知的でより活動的なロボットを作れるのではないかと思い研究を続けています。

人と共存できるロボットの開発
情報学―知覚情報処理・知能ロボティクスー知能ロボット、モーションプランニング、自律システム
知能ロボティクス、動作生成、自律ロボット
人間と共存しながら、自律的に動き、人手に代わる様々な作業をこなしてくれるロボットがあれば、私たちの生活は、より便利で快適なものになるでしょう。しかし、人間にとっては簡単なことも、ロボットには大変難しい作業はいろいろあります。これらの難しい作業を、可能にすることを目標に次のような研究を進めています。
転ばずにスムーズに歩くことを目的に、 幾何学や力学を用いた計算をより正確に、より高速に行うためのアルゴリズムを研究しています。また、これらの手法の検証や改良のために小型のヒューマノイドロボット(K-robo 他)を使って、歩行、階段の昇降や抱きかかえ、習字などを行っています。また、踏み替えによる転倒回避は、従来のバランスを崩さずに歩くというだけでなく、さらに、バランスを崩しても人間のように、とっさに足を踏み出して転倒を回避する動作を生成しています。
工場内で作業を行うロボットは、既知の障害物にぶつからない動作をあらかじめ教えられています。ロボットが人間に近い環境で作業できるようになるためには、ロボット自身が障害物を認識して、それに合わせて動作することが必要です。現在は、
① 障害物がわかっている場合
② ロボットが自分の位置を知る、障害物の配置情報を知ることを同時に行う場合
③ 障害物を認識するためにセンサーを動かす、その際にセンサーが障 害物と衝突しないようにする場合 などに分けて取り組んでいます。①の例では、産業用のロボットを用いて、アーム(腕)全体を、13個の仮想の球体で包み、長方形の障害物に対して、効率的な干渉チェックを行っています。これらは計算 機上のシミュレータで検証します(図1)。その他に、②の例ではレーザーレンジファインダ(距離計)を搭載した車両型ロボットを用いて、地図を生成しながら移動させる、③の例では、産業用ロボットアームにレーザーレンジファインダを搭載した研究を行っています。
画像認識技術を取り入れた研究
旧型の実験ロボットでは、いろいろ限界がでてきたので、新しく実験に適したオリジナルなロボットとして、構造・制御回路・ソフトウエアの設計・製作を行った。
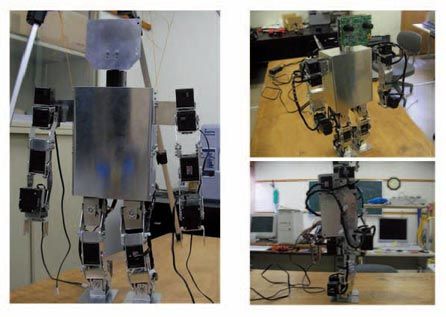
K-robo 外観
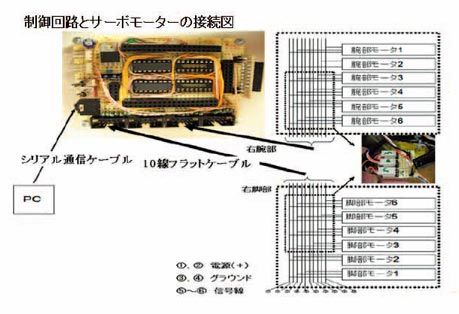
制御回路部の一部
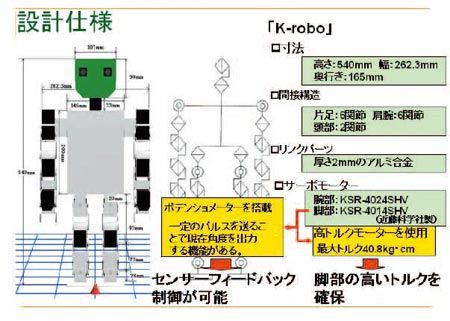
構造設計の一部
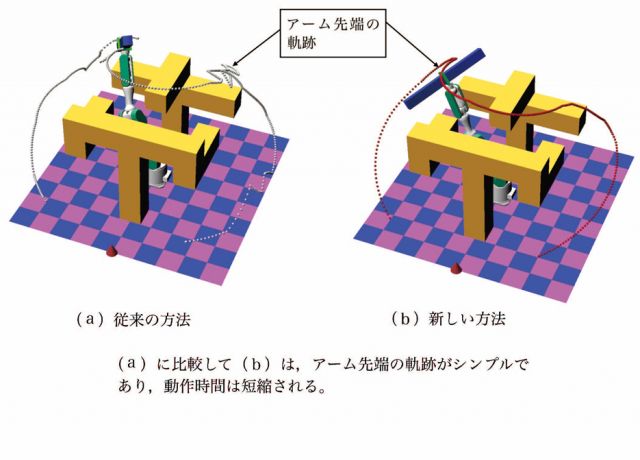
図 3. アームの干渉回避動作

