





准教授
こばやし じゅん
人間と同等の作業が可能なロボットを実現することを目指して、また人間とは異なる方法で、人間以上の能力を実現することを目指して、研究に取り組み始めました。

ときにはやさしく、ときには力強いロボットを目指して
① 制御工学
② 知能機械学・機械システム
③ 機械力学・制御
ロボット、制御、力学、センサー、組み込み
人間は、作業内容に応じて、筋肉を緊張させたり緩めたりして、関節の硬さを変えることができます。そうすることで、衝撃力を吸収したり、柔軟な動作を実現したりすることができます。本研究では、人間の関節が備える、そのような特徴を持つ、ロボットアームを実現することを目指しています。
人間の関節は、基本的には伸筋と屈筋の拮抗作用により回転します。そして、共収縮により関節の硬さを変えます。現在開発中のロボットアームは、非線形バネを介したワイヤ駆動により、人間の関節構造と同じような作りにして、人間のような可変剛性関節の実現を目指しています。
関節が柔らかなロボットアームは、その柔らかさをうまく利用してやると、効率的に大きな力を生み出すことができる可能性があります。「共振」という物理現象を利用するのです。たとえば、共振状態になってしまうと、それほど強くない風でも大きな橋を壊してしまう場合があります。本研究では、共振現象を積極的に利用して力を生み出すロボットアームを実現することを目指しています
ロボットアームを共振状態にするためには、非線形振動子を用います。非線形振動子の引き込み特性を利用すれば、ロボットアームの振動状態に同期した信号を生成でき、その信号によりロボットアームを共振状態にすることができます。
人間の筋骨格系と神経系を参考にした、人に優しいロボットシステムの開発
【共同研究】
『人間のように関節の硬さを変更できる関節駆動モジュールの開発』財団法人 飯塚研究開発機構調査研究開発事業、(2008-2009)
(三ツ和金属株式会社、福岡県工業技術センター機械電子研究所との共同研究)
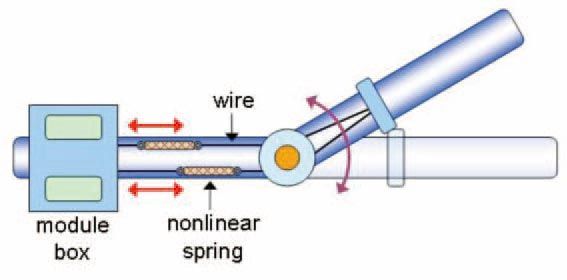
可変剛性関節駆動モジュールの概念図

可変剛性駆動モジュール1号機
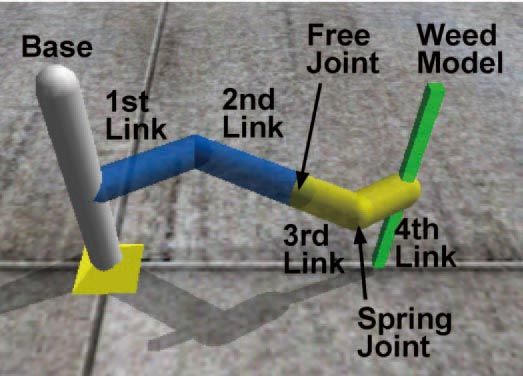
草抜きロボットアームのシミュレーションモデル
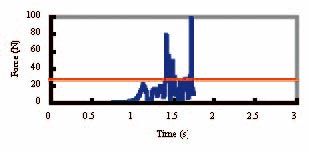
草抜きロボットアームが振動現象を利用して発生 させた力(赤線は振動現象を利用しない場合に発生できる力の大きさ)

