





教授
ながおか けんじ
学生時代は勉強よりもスポーツに明け暮れた日々でした。何か明確な「きっかけ」があったわけではなく、自分の将来を考え始めた大学二年生の春に、心の奥底にあった「宇宙」と「ロボット」への言い知れぬ興味から、自分にはこの仕事しかない、という根拠のない自信で突き進んだ結果、現在に至っています。幸いなことに、その想いは今も変わりません。
宇宙開発を切り拓くロボティクス技術
機械力学・制御
知能機械学・機械システム
航空宇宙工学
ロボット工学
宇宙工学
テラメカニクス
宇宙環境では地球の重力とは大きく異なる条件での作業が必要です。私の研究室では宇宙環境を想定したロボット技術に着目しています。
❖マイクログラビティ・ロボティクス
マイクログラビティ(微小重力)な宇宙環境下で活動するロボット技術に関する研究です。マイクログラビティ・ロボティクスでは、対象とするロボットシステムが外の環境との相互作用によって生じる「反力」と、ロボットシステム自身の運動によって生じる「反動」のダイナミクスを統合的に理解した上で、適切に運動を制御することが重要となります。
❖惑星探査ロボティクス
地球外天体上を移動探査する、主に車輪移動機構を有した惑星探査ローバの走行力学と制御に関する研究を行っています。非常に細かな砂で覆われた月や火星のような極限環境で移動探査を行う上では、車輪と軟弱地盤との相互力学(テラメカニクス)を把握し、限られたセンシング情報を組み合せて所望の走行制御を実現することが必須となります。また、無人で移動探査を行う車輪型ロボットの実現に向けては、ロボット自身の知能化・自律化技術も実現すべきキーテクノロジーとなります。
❖未踏探査テクノロジー
月や火星などの地球外天体上に限らず、地上においても従来の移動ロボットではアクセス困難な未踏領域は数多く存在しています。その中でも、断崖絶壁でのフリークライミングと、地中への掘進(掘削推進)を可能とするロボット技術の実現に向けた研究開発を進めています。いずれの技術も、これまでのロボット技術では実現困難なタスクの実現を可能とするフロンティア技術です。
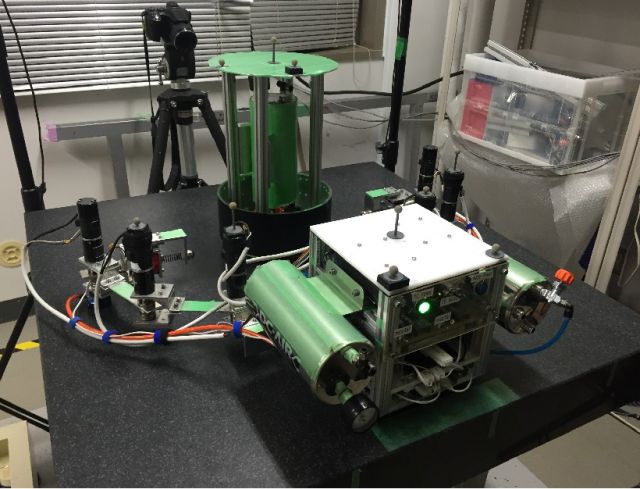
図1:宇宙デブリ捕獲のための軌道上宇宙ロボットによる地上試験

図2:軟弱地盤を走行する屋外移動ロボットのための単輪走行試験装置

図3:屋外不整地探査ロボットシステムの研究開発
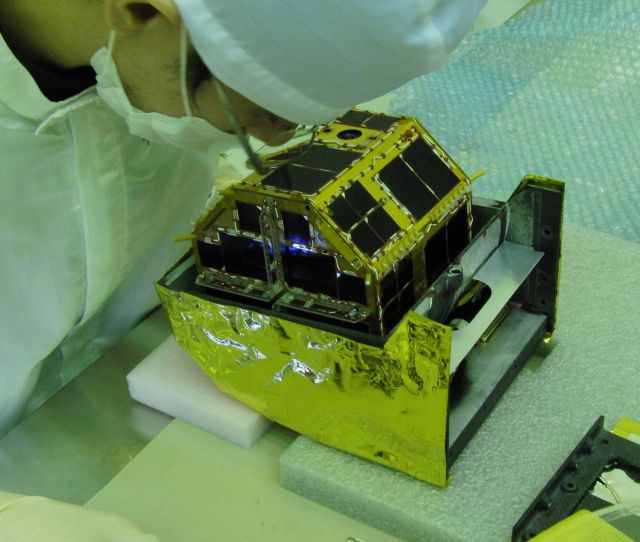
図4:超小型小惑星探査ロボットの研究開発

図5:断崖絶壁クライミング・ロボットの研究開発
❖3Dプリンタ(FDM,SLA)
❖単輪走行試験装置
【科研費(代表)】
①『偏心モータによる繊毛型推進機構の微小重力環境適応型ホップ移動に関する力学理論』(2012~2014年度)
②『異方性と不確定性を内包したフリークライミングロボットの自律歩容原理』(2018~2019年度)
【共同研究】
①『不整地を歩行・跳躍探査する昆虫型ロボットのプロトタイプ開発』(2016年度)
【受託事業】
①『知覚車輪の研究開発』(2016年度)
②『クロスモーダルな知覚車輪を統合した極限探査ロボットの開発』(2017~2018年度)

