





教授
さがら しんいち
修士課程の研究テーマは流体力が作用するシステムの制御でした。民間企業への就職を考えていたところ、偶然他大学制御工学研究室助手の話があり、採用されました。1年半後、本学のロボット工学研究室の助手となり、初めて各種ロボット制御のテーマに関わるようになりました。
作業する腕を持つ浮遊型ロボットシステムの開発
知能機械学・機械システム
マニピュレータ、水中ロボット、宇宙ロボット、制御
人間とって極限環境である海洋や宇宙空間で活動可能な、腕を持つ浮遊型ロボットの制御法開発を行ってきました。近年は、人間と同様に2本の腕を持つロボットの制御法や、複数のロボットによる協調制御法の開発に取り組んでいます。
また、開発制御法の有用性を検証するために、各種防水対策を施した水中ロボット実験機を製作しています。
水中ロボットを制御するためには,ロボットの位置と姿勢、腕の状態、作業対象との接触状況などを把握する必要があります。そのため各種計測システムの開発もあわせて行っています。
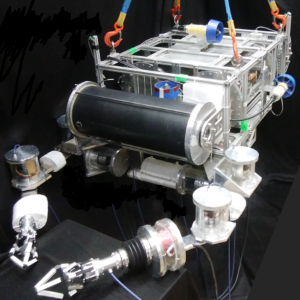
双腕水中ロボット(吊下げ状態)
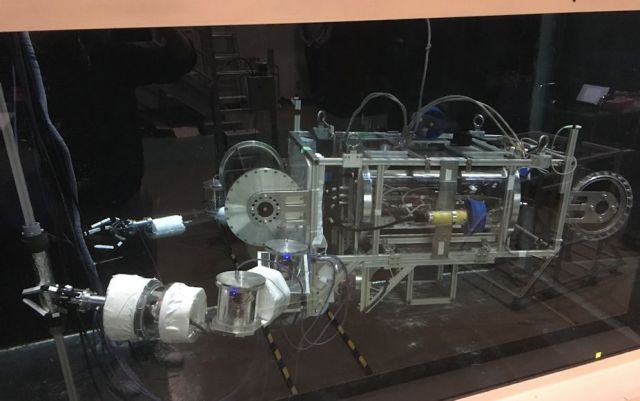
双腕水中ロボット(浮遊状態)
【受託研究】
➀サンゴ礁モニタリング画像からのオニヒトデ自動検出技術の開発 (2015-2017)
➁災害対応ロボット油圧アームの多軸協調制御(2016)

