





准教授
さかい のぶお
小学校2年生の頃からポケットコンピュータで遊んでいました。その頃から将来は何かの専門家になりたくはないと思っていました。システムを考えるのが好きで、中三の時に自作プログラムを評価してくれる機会があり残念ながら落選してしまいました。その時に技術持っているだけではダメでアイデアがとても大切だとわかりました。現在も研究の中で「わからないところをやる」ことに繋がっています。

生体の仕組みを研究し、工学・医学の融合を目指し・・・そして幅広い分野への研究へ
知能機械、生体医工学
リハビリテーションロボティクス,生体機能設計学,医用工学,トライボロジ
私の専門分野は、大きく分けると機械工学、細かく言えば設計工学(システムとデザイン)が基礎となっています。その中で研究対象の多くが人とその生活環境をターゲットとしています。具体的にはリハビリテーションロボティクス、生体機能シミュレートのための生体規範型ロボット関節機構、生体関節の機能発現メカニズムの解明、ロボット医療機器の開発、人工関節、歯科インプラント、生活環境トライボロジなどの研究です。
ヒト(人体)そのものは非常に巧妙なシステムであり、その活動を支援する機械システムの開発のためには、ヒトの機能を理解する必要があります。よって、ヒトとその周辺に関する技術開発を進めるとヒトを知るツールそのものとなり得ます。そこで、ヒトを知ることとそれを活かしたシステムを構成する設計過程の総称として、私たちは「生体機能設計学」という言葉で研究活動を紹介しています。生体関連の研究は、機械工学といった工学的知識のみではなく、医学・運動療法学・生物学といった幅広い知識を総合し再構成しながら取組む場面が多く、異分野複合領域の一つです。
工学的視点は人にとって何らかの有益なものを合目的に構成するための手法という考え方もあります。生体システムに生ずる現象を工学的視点で理解し、それを有用なシステムとして構成する研究は、対象が自分(=ヒト)自身のことであるので、非常に興味深い分野であると私は考えています。
「生体機能設計学」の中で私自身が特に研究対象としているものは、主にメカトロニクス・ロボティクスを生体分野へ適用する研究です。メカトロニクス・ロボティクスは電気・機械・情報等の複合領域であり、さらに別の複合領域であるバイオエンジニアリング領域へ適用・融合していくと、その成果は人に対して直接的に関わるものとなります。
専門とする機械工学の知識に対してまだまだ半人前ですらないのですが、それでもなお、医療領域や生体組織といった異分野への興味に駆り立てられ、現在に至っています。複合領域は専門性を持って参入するというのも一つの手法と思いますが、私の世代は最初から複合領域の環境で学び育った世代ということも原因でしょう。分野が異なれば文化(言葉・習慣・伝統・儀式など)の違いが現われる場面もあり、それを解決、調整するには、単純ですが相手と十分に話し理解することだと思います。
私の属する総合システム工学科は電気と機械、情報その他を同時に学ぶ学科として創設されています。一つの専門分野だけではなく、様々な分野を学び、それらを総合する能力を持った学生を、研究活動を通して育てていきたいと思います。
総合システム工学科は分野的にとても広い教員群であり、あらゆるものが新鮮で文化の違いも含め刺激を受けています。工学分野の様々な技術や理論を医療分野などに応用し融合させることが夢です。中世の英哲はあらゆる分野に精通していたと伝え聞きます。私も今後とも機械工学や設計工学とともにメカトロニクス・ロボティクスを生体分野へ応用するだけでなく、現在より広い分野に対して研究活動領域を広げて行きたいと思っています。
リハビリロボット
脳卒中リハビリテーションのための知能化リハビリ機器の開発
医療法人社団三光会誠愛リハビリテーション病院(2009~2010)
脳卒中上肢リハビリテーションのためのロボット装具の開発並びにリハビリ機器の知能化
医療法人社団三光会誠愛リハビリテーション病院(2009~2010)

リハビリテーション支援用ロボット装具 左:肩甲骨-体幹用機構 右:着座駆動モデル
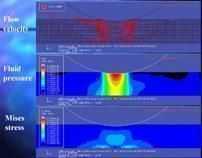
関節軟骨の固液二相性潤滑 上:液相流動 中:液相間隙圧 下:固相応力

