





助教
こむら ひらく
授業で触覚について学ぶ機会があり、滑りや振動、硬さを知覚する仕組みに面白さを感じました。人の指の機能を持った触覚センサができればロボットに色々な作業をさせることができ、触り心地を人に提示できる技術ができればVR空間で様々な体験ができます。このような面白い応用が考えられるところも触覚研究の魅力だと思います。
ヒトの触覚研究を通して新たな工学技術を生み出す
人間機械システム、ヒューマンインターフェース、仮想現実感
触錯覚、運動錯覚、感性制御、Hapticディスプレイ
触り心地の錯覚現象としてVelvet Hand Illusion (以後VHI)という錯覚現象があります。これは、テニスのガットのようなワイヤーで構成された格子を両掌で挟んで前後にこすると滑らかな面の感覚が生起する錯覚現象です。私はこの錯覚現象が、視覚や聴覚研究で知られるGestaltに関連していると考えています。Gestaltとは「部分では説明できない複合的なまとまり」とされ、視覚認識で考えられた概念です。視覚のGestaltにおいてパーツのまとまりがデザイン、聴覚のGestaltにおいて音の繋がりがメロディとして認識されるのと同様に、触覚のGestaltには触り心地が生起すると考えられます(図1)。そこで、VHIという触錯覚現象を通して触覚のGestaltを解明しようとしています。

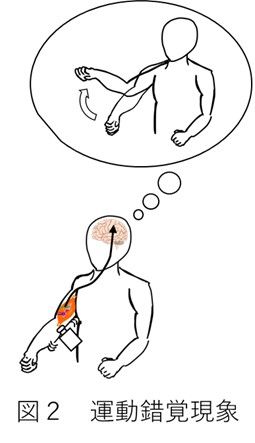
筋肉や腱にマッサージ機による振動を与えると、身体が動いていないにもかかわらず身体が動く感覚が生起します(図2)。これは運動錯覚と呼ばれる錯覚現象で、リハビリテーション研究やVR研究で注目されている現象の一つです。振動刺激の周波数や加速度を変化させると、身体が動く感覚も変化します。私の研究では、この刺激と感覚の関係を解明し、この運動錯覚を制御することを目標としています。
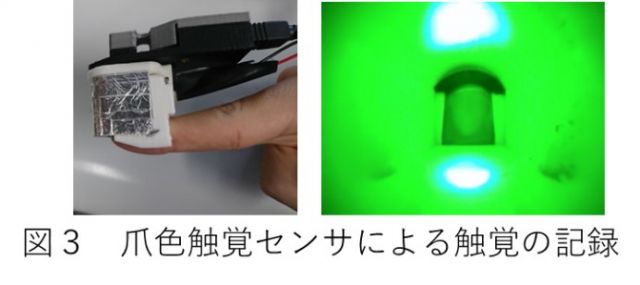
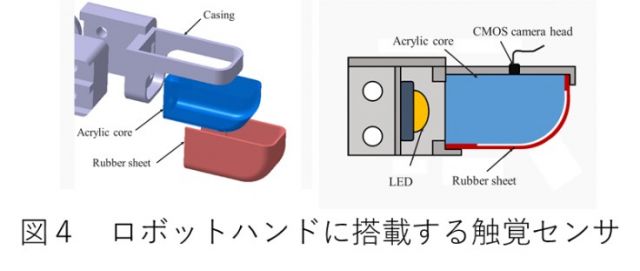
卓越した技能を有する人の手技を記録再生することを目指しています。人の手技を記録するために、爪色触覚センサを開発しています。このセンサは、指に力を入れたときの爪の血流変化を、血液の近赤外光の吸光特性を利用して計測し、その時の力を推定するというものです(図3)。このセンサを通して指と接触物の接触面に働く垂直力とせん断力を高精度に計測することを目指しています。また、記録した触覚情報を再生するためにロボットに搭載可能な触覚センサも開発しています(図4)。
運動錯覚によって生起する“身体が運動する感覚”をより細かく制御し、四肢のリハビリテーションや仮想現実感に使える技術に発展させたいと考えています。リハビリテーションに関しては、錯覚によって得られる運動感覚が、運動機能回復にどの程度効果があるのかを明らかにしたいと考えています。仮想現実感に関しては、複数の筋肉に同時に刺激を与えたときに、どの程度複雑な運動を知覚させることができるのかを明らかにしたいと考えています。この錯覚は、寝たきりの状態でも身体が動く感覚を与えることができます。ですので、この技術が完成すれば高齢者がベッドに居ながらにして色々な経験ができるようになる未来を創れると考えています。
実際に開発した爪色触覚センサで熟練者の手技を記録再生する試験を行い、センサの改良をさらに進めていきたいと考えています。具体的には、マッサージの手技を垂直力とせん断力の力情報として記録、ロボットで再生し、人によるマッサージと同様の効果がロボットで実現できるかを調査します。この技術は、手で行う巧みな作業はどのようなものでもデータ化することができます。ですので、プロの方々の触覚情報を記録して指導に使用することや、人間国宝の方の手技を後世に記録として残すことが出来るようになると考えています。
【論文】
Komura, H., Kubo, T., Honda, M., & Ohka, M. (2021). Degree of muscle-and-tendon tonus effects on kinesthetic illusion in wrist joints toward advanced rehabilitation robotics. Robotica, 1-11
Komura, H.; Nakamura, T.; Ohka, M. Investigation of Tactile Illusion Based on Gestalt Theory. Philosophies Vol 6, No. 60, 2021.
H. Komura, T. Nakamura, M. Ohka, Formulation of tactile Gestalt to express variation in velvet hand illusion caused by out-of-phase cycles of two wires, Journal of Advanced Mechanical Design, Systems, and Manufacturing, Vol. 14, Issue 6, 2020(査読あり)
小村啓・大岡昌博:滑らかさを惹起する触覚のGestaltに関する基礎調査,日本バーチャルリアリティ学会論文誌,Vol.24-1, pp. 43-51, 2019 (査読あり)
N. Rajaei, M. Ohka, H. Nomura, H. Komura, S. Matsushita, T. Miyaoka: Tactile mouse generating velvet hand illusion on human palm, Int. J. Adv. Rob. Syst., pp.1-10, 2016 (査読あり)

