




助教
もりもと だいち
高等専門学校在籍時に研究というものに出会い、研究者という職業を意識し始めました。その後大学時代に出会った、生物に着想を得たロボット技術や計算技術に興味を持ち、今日まで研究を続けています。
ロボットの群れを操る技術の研究
知能ロボット、ニューラルネットワーク、進化計算
スワームロボティクス、Neuroevolution、強化学習、物理シミュレーション
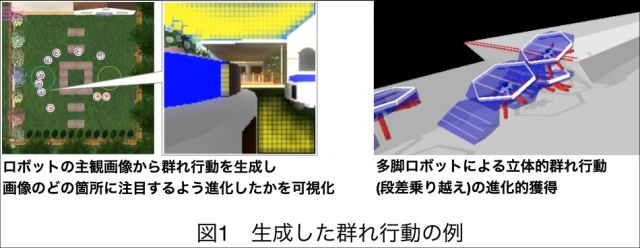
自然界におけるアリやハチ、魚などの群れに着想を得て、多数の自律ロボットによる群れ行動の実現を目指す研究分野はスワームロボティクスと呼ばれます。ロボティックスワーム(ロボットの群れ)は、各ロボットの局所的な相互作用からシステムとしての挙動を生成するため、一部のロボットの故障やロボット台数の変化があったとしてもタスクを遂行することが期待されます。インフラの点検や農業、海洋や宇宙の探査など様々な応用が期待されますが、そのために解決すべき課題の一つとして「各ロボットの制御器をどのように設計するか」というものがあります。この難しさは、「多数の構成要素間の相互作用からなる系において、局所的なルールから系としての大域的挙動を予測することが難しい」という点に由来しており、制御器の設計はスワームロボティクスで取り扱われるメイントピックスの一つとなっています。設計者の試行錯誤による手探りのアプローチが多く行われる一方、機械学習の手法を用いて制御器を設計する試みが行われており、私の研究分野もここに位置しています。進化計算や強化学習といった計算手法と物理シミュレーションを用いて、ロボットの群れ行動を実現する制御器の設計法を研究しています。
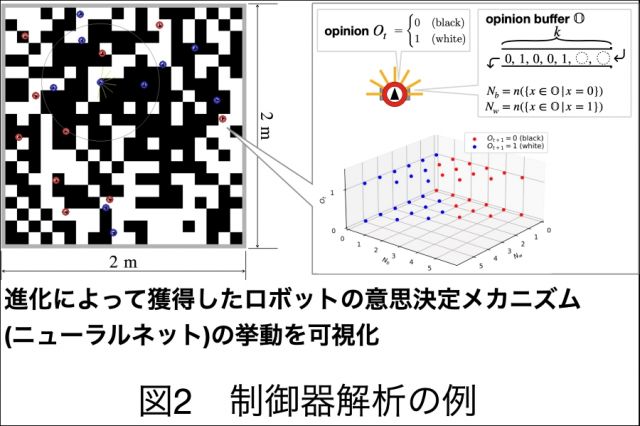
上記の「機械学習法を用いたロボットの群れ行動生成」では、伝統的に進化計算という手法を使ったアプローチが成功を収めてきました。多くの場合、制御器として人工神経回路網(artificial neural network: ANN)が用いられます。近年の人工知能ブームの立役者でもあるANNは強力な関数近似器であり制御器として有効に動作する一方、その挙動はブラックボックスになりやすく、機械学習法(ここでは主に進化計算)がはじき出した解を人間が理解するのが難しいという事態が生じます。そこで、獲得された制御器を解析し、機械学習が導き出したロボットの行動則を抽出する研究を行っています。まだ始めたばかりの研究ではありますが、ロボットの意思決定戦略の一部を可視化するといった結果が得られました。この研究では、機械学習が導き出した制御則を誰もが使える形で提供する他、説明可能AIの観点から人工知能の可読性向上に貢献することが期待されます。
上述の「行動則の抽出」についてはまだ始めたばかりであるため、今後群れ行動の種類やロボット台数の規模、各ロボットのスペック等の条件を拡張して研究を行っていきたいと考えています。また、これまでシミュレーションを用いた研究を多く行ってきましたが、実環境での運用とはやはり乖離があるため、今後は実機のロボットを用いた研究を増やしていきたいと考えています。加えて、機械学習法としてはこれまで進化計算を多く用いてきましたが、強化学習と呼ばれる手法も一部使用した実績があり、これらのハイブリッド手法に興味があります。「進化」と「学習」という異なるメカニズムに着想を得た計算技術を組み合わせ、ロボティックスワームに限らず色々な対象に適用したいと考えています。
2023年度 北海道大学情報基盤センター萌芽型共同研究 「深層ニューロエボリューションの構成法に関する研究」(分担)
2022年度 北海道大学情報基盤センター萌芽型共同研究 「進化型人工神経回路網によるロボティックスワームの群れ行動生成とその解析に関する研究」(分担)
【論文】
Daichi Morimoto, Haruhi Tsukamoto, Motoaki Hiraga, Kazuhiro Ohkura, and Masaharu Munetomo, ""An evolutionary robotics approach to a multi-legged robotic swarm in a rough terrain environment"", Artificial Life and Robotics, Vol. 28, pp. 661--668 (2023)
Daichi Morimoto, Yukiha Iwamoto, Motoaki Hiraga, and Kazuhiro Ohkura, ""Generating Collective Behavior of a Multi-Legged Robotic Swarm Using Deep Reinforcement Learning"", Journal of Robotics and Mechatronics, Vol. 35, No. 4, pp. 977--987 (2023)
Daichi Morimoto, Motoaki Hiraga, Kazuhiro Ohkura, and Masaharu Munetomo,, ""Generating and Analyzing Collective Step-climbing Behavior in a Multi-legged Robotic Swarm"", Proceedings of the Thirteenth International Conference on Swarm Intelligence , pp. 324--331 (2022)
森本大智, 平賀元彰, 大倉和博, 松村嘉之, “深層強化学習と Deep Neuroevolution によるロボティックスワームの群れ行動生成と解析”, システム制御情報学会論文誌, Vol. 33, No. 5, pp. 163--170 (2020)

