





教授
あさみ けんいち
本校の情報工学部の学生だった頃、コンピュータ技術・インターネットのコミュニティに惹きつけられていきました。人工知能、生体工学、ロボティクスの研究を行い、現在はLinuxを応用した、ものづくりを高度化する組込みシステムに取り組んでいます。

組込みリアルタイムシステムを、社会応用へ!
①1003 計算機システム・ネットワーク
②1005 知能情報学
③1006 知覚情報処理・知能ロボティクス
組込みシステム、リアルタイムシステム、ビジュアルトラッキング、ロボティクス、サービスロボット、フィジオーム
宇宙システムのための画像センシングの組み込みシステム実装を行っています。
また、重要情報抽出や特徴追跡など自律システムの高度化に取り組んでいます。
画像計測・機械学習・姿勢制御のリアルタイム処理を再構成可能デジタル回路FPGAで実現し、データ収集・分析・利用能力等の向上を目指します。

FPGAボード
CMOSカメラ
組込み技術、リアルタイムOS技術を高度化して、活用を広めるとともに、生活支援ロボットなどの社会応用的な研究に進めて行きたいと考えています。
【研究】
生体循環系モデルの統合型フィジオーム(生命あるいは生体の生理機能の総体)ツールに関する研究
日本学術振興会、科学研究費補助金、基盤研究C(一般)、代表者
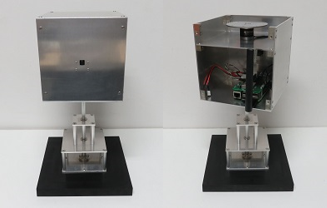
超小型人工衛星の画像計測による姿勢制御

小型無人航空機を用いた3次元地図の生成

自律探査ローバーの全方位カメラでの環境認識

