





講師
いのひら えいいち
子供の頃から工作が好きで、小学生の時にラジオ製作キットに触れ、高校生の時にパソコンでプログラミングに取り組んでいました。大学生の時に物を動かす機械、特にロボットに興味を持ちました。ロボットの研究では、機構、制御システム、ソフトウェアの設計開発と広い範囲で関ることができるのことが魅力です。

両手の動きに注目して補助してくれる筋電義手の開発
知能機械学・機械システム 、
知覚情報処理・知能ロボティクス、
感性情報学・ソフトコンピューティング
ロボット、義手、ニューラルネットワーク
両手作業を円滑に行えるように、健常腕の動作に合わせて自動的に動き出す筋電義手について研究しています。肘及び肩を失った障碍者(高位切断者)の場合、残存する筋肉は少ない一方、筋電義手に必要となる駆動関節数は多くなります。そのため、高位切断者は筋電義手によって失われた部位の機能を補うことが困難になります。 そこで、限られた信号源から義手の動作を生成するため、両腕の協調動作に着目しました。そこで、代表的な動作パターンを用いて、両腕の協調動作に隠れた関係を協調動作生成システムに学習させます。学習済の協調動作生成システムに健常腕の動作を入力することによって、 義手の協調動作を得ることができます。これにより、片手では困難な、大きな箱を持つ動作や、服やバスタオルを広げるような動作を一人で実現できるようになります。
2番目の研究として、つかむ物の形状に合わせて指を動かすことができる多指筋電義手の動作生成システムについて研究しています。人の手と同等の機能を持つ多指筋電義手は関節数が多いため、筋電信号だけで義手を操作することは困難です。 本研究では、筋電信号と指の動作の間の関係を、生体の神経回路網のように学習能力を持つニューラルネットワークに学習させます。現在は、出力できる動作パターンの多様性の実現を目指して、ニューラルネットワークの改良に取り組んでいます。
3番目の研究として、人間とロボットの間のコミュニケーションを通じて、新たな行動(手順)を与えることができるロボットシステムの研究に取り組んでいます。日常生活の中で一般の方がロボットに動き方を簡単に教えることができるようなシステムの開発を目指しています。
人間とロボットとのコミュニケーションの中から、ロボットが人間の意図を読み取り、ロボット自らがそれを実現する方法を考え、実行することができるようなロボットシステムの実現が目標です。

産業用マニュピレータ

コミュニケーションロボットPaPeRo
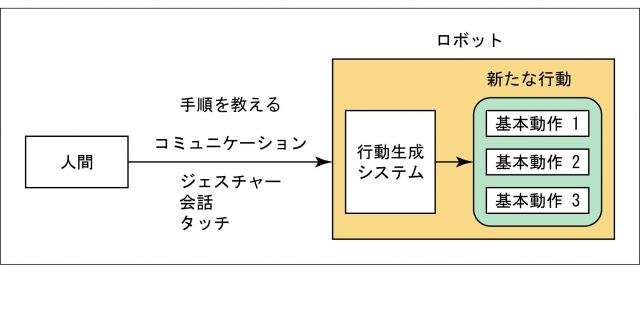
自律ロボットにおける行動の獲得と教示
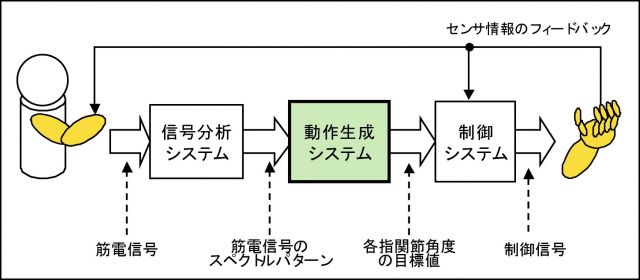
筋電-動作連続変換型筋電義手
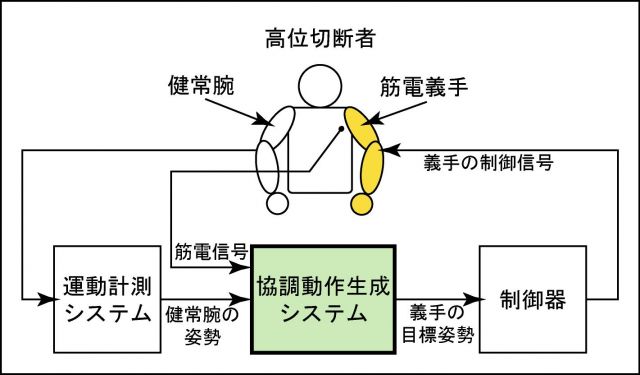
両腕協調動作生成機能を持つ筋電義手
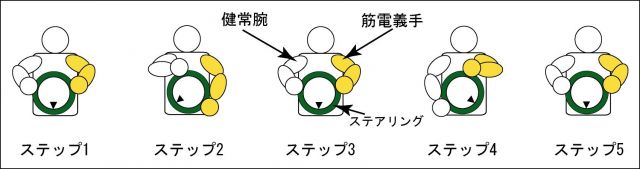
両手作業の一例(ステアリング操作)
多肢筋電義手開発の為の計測
http://fais.ksrp.or.jp/05kenkyusha/srchresult.asp?ID=e-inohira01

