





准教授
たかしま かずと
大学の4回生のときに、直接人の役に立ちそうな医療工学の研究室に入り、修士までいた後、企業に勤めていたのですが、研究がやりたくて、元の研究室に戻って博士号を取得しました。現在もその頃からの低侵襲手術のための医療機器に関するテーマを続けています。学位取得後は、理研の研究員として、ロボットのセンサなどの研究も始め、現在も続けています。

やわらかいセンサ・アクチュエータの開発
人間医工学 機械工学
スマートソフトマテリアル、触覚センサ、低侵襲手術、人と接するロボット、ソフトアクチュエータ、医療機器の力学試験、バイオミメティクス、バイオトライボロジー
近年、脳梗塞、動脈瘤や狭心症などの治療のために細長い「カテーテル」を使った施術法が普及しています。患者に与える負荷やリスクが低く、また治療コストの低減にもつながっており、術後の回復など従来の開頭、開胸手術に比べて安全だからです。
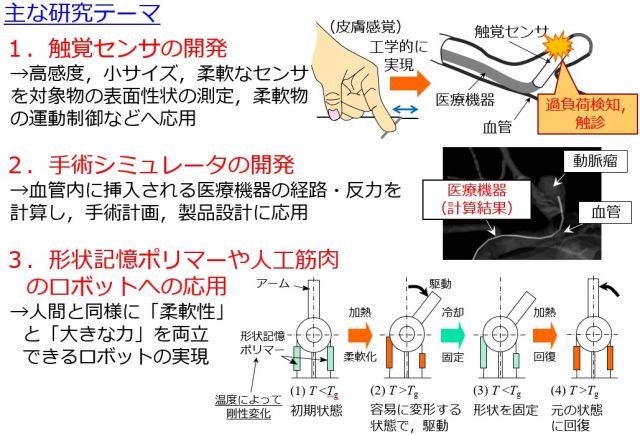
私の研究の1つは、カテーテルの先端部に高感度、小サイズ、柔軟な触覚センサを搭載して医療機器の操作性の向上や生体の機械的特性の測定に応用することです。この触覚センサは、人間の指のような感覚で生体や患部の状況を把握することによって、様々な生体組織の診断への応用を目指しています。触覚センサの材料としてはポリフッ化ビニリデン(PVDF)などの有機強誘電体を研究対象としています。また、同様の手法を応用し、熟練工の皮膚感覚を模倣して工場で利用できる触覚センサも開発しています。
研究の2つ目は、血管内に挿入されるカテーテル、ガイドワイヤ、コイルなどの治療デバイスの留置過程のシミュレータの研究をしています。PCを用いた数値計算と実体血管モデルを用いた実験を統合し、これらの治療デバイスが治療効果を発揮できるように、留置過程を定量的に評価することを目標としています。開発したシミュレータを用いることで、治療手技の定量的分析、最適な治療デバイスの設計、適切な術前・術中計画が可能になります。一方、前述のカテーテル型触覚センサの評価、仕様の明確化にも応用できます。
3つ目として人間の筋肉は、動作に応じて関節の周りの屈筋・伸筋を弛緩・収縮させることにより関節を柔らかくしたり硬くしたりしています。ロボットアームではモータやギアによって駆動されていますが、大出力が得られても関節が硬くなってしまいます。人間の筋肉のように柔軟性と大きな力を両立させたロボットを開発するために形状記憶ポリマーや人工筋肉の応用を考えています。形状記憶ポリマーと人工筋肉を個別に応用するだけでなく、組み合わせることで、従来にない動きができるアクチュエータも開発できます。一方、形状記憶ポリマーを用いることで、日常生活など幅広い複雑な環境で使用できるように、測定レンジや感度が変更可能な力覚センサ、触覚センサの開発も行ってきました。
これまで使ってなかった材料を使ったセンサ・アクチュエータも開発していきたいと思っています。
(1)柔軟なセンサ・アクチュエータの力学試験装置
(2)血管内治療機器の力学試験装置
(3)血管内治療デバイス留置シミュレータ
などなど
1) 鎌谷良一,高嶋 一登,
「直動転がり案内ユニット」,
特許公開2003-028156
2) 葭仲 潔,高嶋 一登, 池内 健,
「触覚センサ及び触覚センサ装置」,
特許公開2006-102152
3) 高嶋一登,向井利春,中島弘道,林衆治
「手術支援装置」
特許公開2008-307127
4) 高嶋一登,中西 剛,郭 士傑,橋本 和信,向井 利春
「可動体の駆動装置およびその駆動方法」
特願2009-134940
5) 高嶋一登,ロシタ ジョナサン,向井 利春,郭 士傑,橋本 和信
「形状記憶ポリマーを用いたアクチュエータおよびその制御方法」
特願2010-011102
(1) 平成28年 形状記憶ポリマーの温度による剛性変化を利用した関節および皮膚の柔軟性可変のロボットアームの開発
(2) 平成28年 有機強誘電体を用いたカテーテル型高感度触覚センサの小型化と生体内触診方法の確立
(3) 平成26年 生体分子で機能化したカテーテル型触覚センサの開発補助事業
(4) 平成24年~平成25年 有機強誘電体を用いたカテーテル型高感度触覚センサの開発
(5) 平成24年~平成25年 形状記憶ポリマーの温度による剛性変化を利用したロボットの姿勢維持機構に関する研究
(6) 平成23年 熟練工の皮膚感覚を模倣した触覚センサの開発
(7) 平成22年~平成23年 低侵襲手術用触覚センサを用いた生体内計測・診断技術の確立
(8) 平成20年~平成21年 血流・血管・材料における界面流動ダイナミクスの先進医工国際研究コンソーシアム形成
(9) 平成20年 有機強誘電体を用いた微小・高感度な触覚センサの開発、および生体計測・診断技術の確立
(10) 平成19年~平成20年 シミュレーションによるマイクロカテーテル走行性能の評価と最適化
研究の対象
http://fais.ksrp.or.jp/05kenkyusha/srchresult.asp?ID=k-takashima01

