





教授
いしい かずお

産学官連携を通じて実用的なロボット開発を目指す
1006 知能ロボティクス
5007 知能機械学・ロボティクス
5602 船舶海洋工学
フィールドロボット、全方位移動機構、受動移動機構、跳躍ロボット、ニューラルネットワーク、リアルタイムOS、自己位置同定、ロボカップ、水中ロボコン
極限環境の一つである海洋や公共空間において行動することができるフィールドロボットの設計・開発とその知能化に関して研究を進めています。
1.海洋はロボットの活躍が望まれている環境ですが、水中調査や水中 作業など、自動化が進んでいない実際の海域で活用できる小型の水 中ロボットの開発を目指しています。
2.公共空間で自由に移動できるロボットの開発を目指して、受動移動 機構を有する車輪型移動機構を開発しています。画像処理や距離 データを用いた自己位置推定や環境認識、ナビゲーション技術に関 するソフトウェア開発を行い、実環境で行動するロボットを開発して います。
3.RoboCup中型リーグや水中ロボット競技会への参加を通じて、ス ケジューリング、プロジェクト管理を含めてロボットの知能化に関す る研究を行っています。
人の活動を手助けしてくれるロボットの開発が益々重要となっていきます。ロボットのニーズは多様なため、全能なロボットが望まれますが、必要な機能に絞って最適化することで、実用的なロボット開発ができると考えています。現在の夢は、ロボット開発のための統合システムを開発することです。ロボットの動作環境、作業内容等の制約条件から、ロボットの三次元CADデータ、電子回路基板の設計、動力学シミュレーションと制御系の設計まで自動的に行うロボット開発統合システムの開発を目指しています。

WITH 全方向移動ロボット (キャンパス共通プラットフォーム)
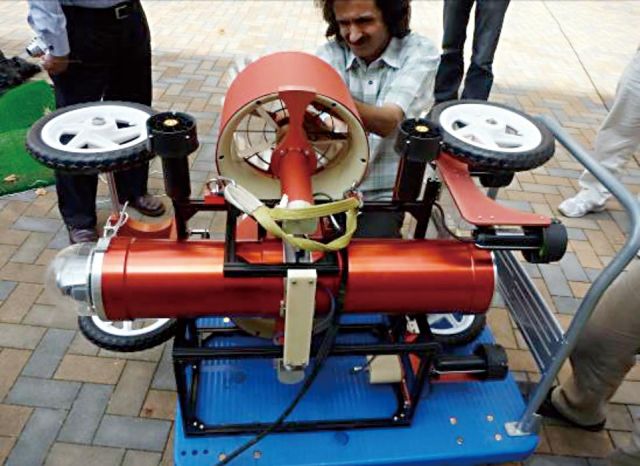
水中ロボットDarya Bird

ディスクトップ型モデリングマシン NC5K (ミヤキ) ×2台
設備は左記の他に
・基盤切削ソー(ミッツ)・FANUCロボドリル(オートチェンジャー付)
① 水中耐圧容器 特願2009-079647 (2009)
② 全方位移動用車輪 特願2009-043468 (2009)
③ 水中清掃装置 特願2009-241592 (2009)
▶【受託研究】
① 全方向移動搬送台車による隊列運行を制御した搬送システムの試作開発 (2009)
② 飯塚市新技術・新製品開発事業 「全方位走行電動台車(フリーダム)の開発」(2008)
③ 下水道管移動ロボットに関する研究 (2008)
④ 文部科学省 知的クラスター創成事業(第2期)・2007-2012、システムLSI応用による自律移動・作業用ロボット制御技術の研究開発 プロジェクトマネージャ
⑤ 新エネルギー・産業技術総合開発機構(NEDO) 次世代ロボット実用化プロジェクト(プロトタイプ開発支援事業)、2004-2005年度、「アーティスティックロボットの研究開発」、研究代表者
⑥ 福岡県産炭地域新産業創造等基金産学官等連携研究開発委託事業 「超小型ロボットビジョンモジュールの開発」 2004-2006年度 研究代表者

http://fais.ksrp.or.jp/05kenkyusha/srchresult.asp?ID=k-ishii01

