





准教授
にしだ ゆうや
海は地球表面の70%以上も占めていますが,その海の中や海底は今だに多くの謎を含んでおり,誰も知らないような場所が数多く存在します.それは日本周辺の海も例外ではなく,水産,鉱物,エネルギー資源の正確な資源量やその周辺の環境がどのようになっているか明確に分かっていません.過酷な環境の海に乗り出し,その資源を調査する海中ロボットの魅力に惹かれ,研究を進めています.

実際の現場で仕事ができるフィールドロボットの実現
知能ロボティクス,知能機械学・ロボティクス,船舶海洋工学
自律型海中ロボット,水産資源調査,コバルトリッチクラスト調査,水中3次元計測
〇水産生物資源量の調査
水産生物資源を持続的に利用するため,日本でも一部の魚種に対してTAC(Total Allowable Catch)が導入され,定期的な水産生物資源量の調査を行い,漁獲量を適切に管理するようになりました.しかし,現状の調査手法は主に着底トロールを利用するもので,起伏の多い複雑な地形では運用できず,また実際の生物分布や生息している海底の状況を把握することはできません.そこで,本研究では一定の高度,速度で海底近くを航行し,海底の詳細な画像を撮影できる海中ロボットを開発しました.このロボットで得られた写真およびナビゲーションデータを用いて生成した一枚の大きなモザイク画像により,今まで分からなかった水産生物の実際の分布状況や周辺環境の状態を明らかにしました.また,撮影画像から特定水産生物を認識し,資源量をカウントする魚種識別手法の開発も行っております.
〇海底鉱物資源量の調査
海水に溶け込んだ酸化物が100万年に数mmの速度で海底面に推積することで形成されるマンガンクラストは,マンガン,銅,ニッケル,コバルト,白金等の鉱物を含んでおり,鉱物資源への利用が期待されています.しかし,海中環境によって分布状況や厚さが大きく変化するため正確な資源量が分かっていません.そこで,本研究では効率的にマンガンクラストの分布状況や資源量を調査するため,東京大学で開発された3次元マッピング装置と超音波厚さ計測装置を搭載した自律型海中ロボットを開発しました.このロボットはマンガンクラストがある凹凸が激しい海底環境でも前方に取り付けたスキャニングソナーのデータを用いて障害物を回避し,高度1.5mという低高度で航行しながら海底を調査することが可能です.
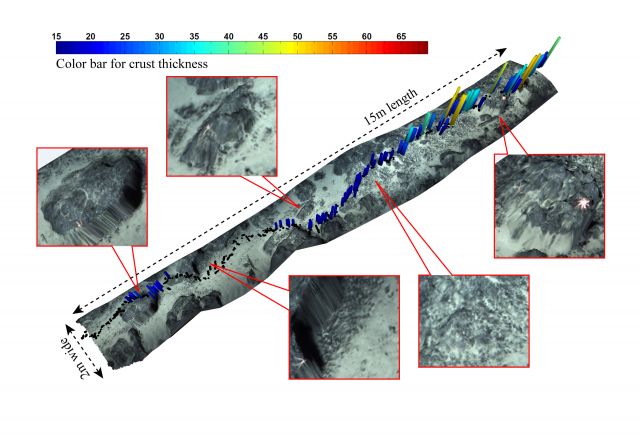
片山海山のマンガンクラストの分布
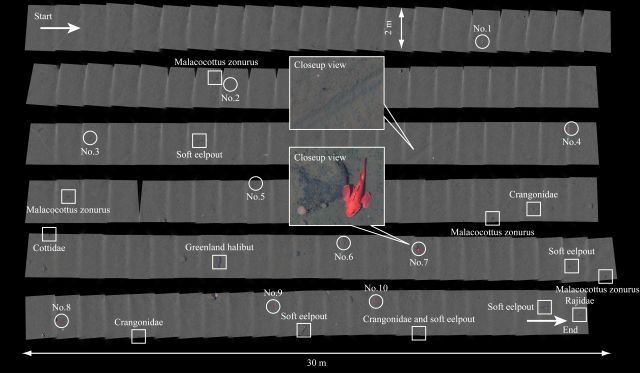
北見大和堆に生息する水産生物の分布
自律型海中ロボットの投入,回収作業は,ロボットを吊ることが可能なクレーンを有する船と多くの人を使って行っているのが現状です.この大変な投入,回収作業がボトルネックとなり,自律型海中ロボットによる海底調査を妨げています.今後は気軽にかつ簡単に自律型海中ロボットを海に投入し,回収できるようなロボットおよびシステムの構築を行いたいと考えています.
これまでに私が開発に関わったロボット
・海底生物捕獲用自律型海中ロボット"Tuna-Sand2"
・マンガンクラスト賦存量調査用自律型海中ロボット"BOSS-A"
・海中ロボット監視用仮想係留ブイ"ABA"
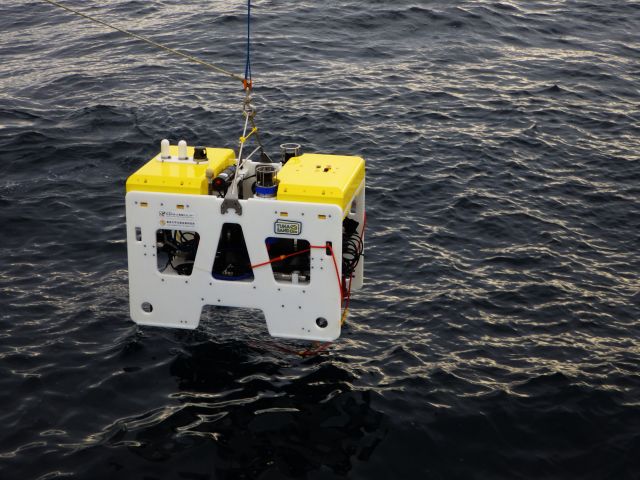
海底生物捕獲用自律型海中ロボット"Tuna-Sand2"
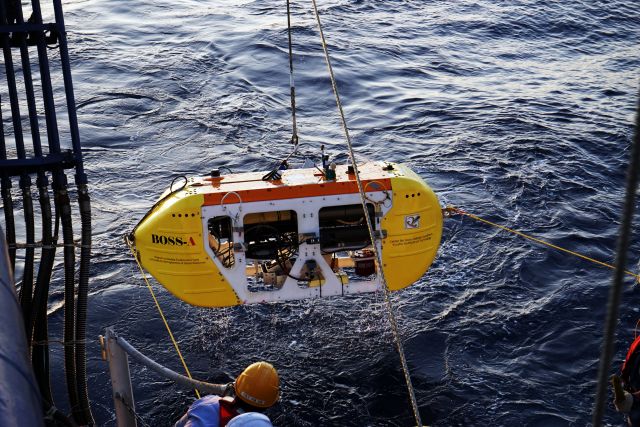
マンガンクラスト賦存量調査用自律型海中ロボット"BOSS-A"
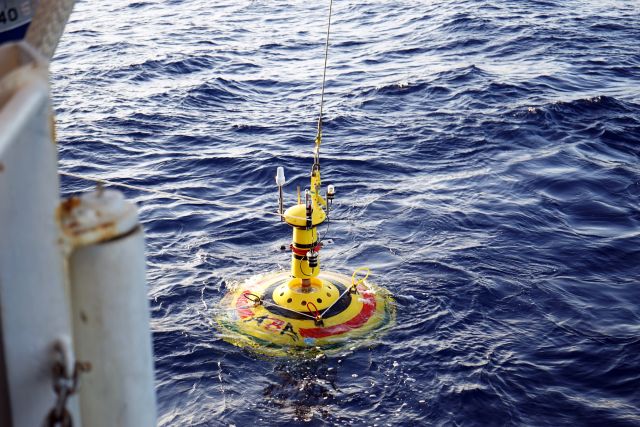
海中ロボット監視用仮想係留ブイ"ABA"
血栓予防装置,石井和男,園田隆,西田祐也,岡本好司,九州工業大学,産業医科大学,特許願2010-170680,2010年
「超広域高速海底マッピングに関する研究」,締結中,(2016-2018)
「海中ロボットを用いた主要底魚資源の分布と資源量に関する研究」,(2015-2018)
Yuya Nishida, et al., Virtual Mooring Buoy ABA for Multiple Autonomous Underwater Vehicles Operation, Journal of Robotics and Mechatronics, Vol.28, No.1, pp.86-90, (2016)
Yuya Nishida, et al., Autonomous Underwater Vehicle BOSS-A for Acoustic and Visual SUrvey of Manganese Crusts, Journal of Robotics and Mechatronics, Vol.28, No.1, pp.91-94, (2016)
Yuya Nishida, et al., Autonomous Underwater Vehicle Tuna-Sand for Image Observation of the Seafloor at a Low Altitude, Journal of Robotics and Mechatronics, Vol.24, No.6, pp.519-521, (2014)
Yuya Nishida, et al., Resource Investigation for Kichiji Rockfish by Autonomous Underwater Vehicle in Kitami-Yamato Bank off Northern Japan, ROBOMECH Journal, Vol.1, Issu 1:2, p.1-6, (2014)

