





准教授
いけもと しゅうへい
研究のきっかけは,進学先を探している際,知能を理解するアプローチとしてのロボティクスという考え方や,その分野の自由な発想に魅せられたことです.その気持ちは今も変わらず,現在は,生物を規範としてロボットのハードウェアやソフトウェアを考えるという研究をしています.
生きものに学ぶロボット・アルゴリズム
知能ロボティクス,ロボティクスおよび知能機械システム
生物規範,テンセグリティ,確率共鳴
生きものは,複雑な環境の中でも優れた適応性を発揮することができます.生きもののような適応性を実現することはロボティクスの大きな目標の一つですが,さまざまな技術が飛躍的に進歩した現在においても非常に難しい問題であり続けています.私たちは,生きものにヒントを得たロボットやアルゴリズムの開発・提案を通じて,その難しさを緩和するアプローチを探しています.例えば,「生き物の身体はロボットに比べて柔らかい材料からできていて,動きを作るための筋肉も多い」というヒントから,「ロボットの身体をあえて柔らかく,アクチュエータを多くすれば,ロボット単体を思い通りに動かすことができない段階から,環境と接触しながら運動を学習できるのでは?」という作業仮説を置き,これまでにない新しいタイプのロボットを開発しています(写真参照).他にも,「避けようのないノイズを頑張って除去するのではなく,常にノイズがあることを前提にするからこそ,単純な構成でも複雑な機能をもつシステムが作れるのでは?」など,柔軟な発想から作業仮説を置き,ロボットのハードウェア・ソフトウェアの開発を通じて仮説を検証する研究を進めています.
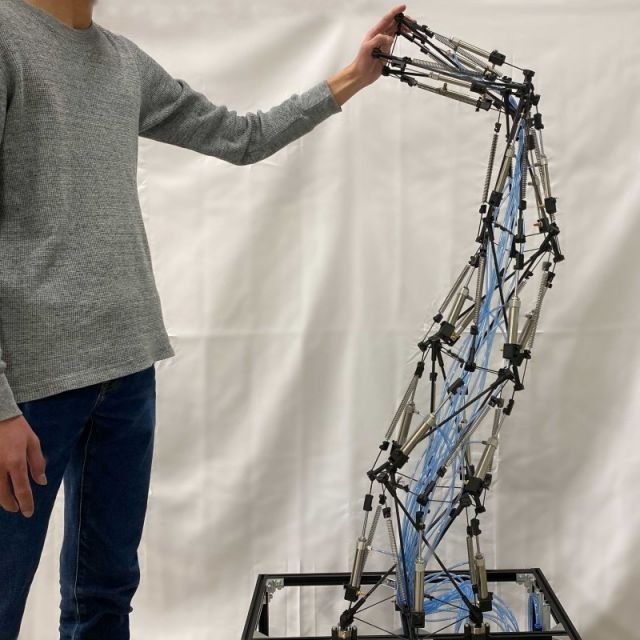
開発しているテンセグリティマニピュレータ
写真のテンセグリティを利用したロボットの開発・制御・学習を継続し,「こういったロボットはどう設計すればよいか?」・「どう動かせば目標を達成できるか?」といった設計論・制御論として整理したいと考えています.また,環境に触れるロボットに必要になる技術として触覚センサの研究を始めているので,その成果をもとに,より実応用に近い研究テーマも始めたいと考えています.
炭素繊維強化プラスチックが利用可能な3Dプリンタ,光学式モーションキャプチャシステム,空気圧制御機器

